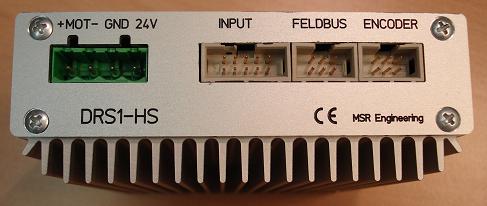
DRS-500-HS - 4Q-Steuerung für Servomotoren
DRS-500-HS System - Servosteuerung / Positioniersteuerung für den Antrieb von einzelnen oder mehreren Linearachsen mit Gleichstrom-Servomotoren im Leistungsbereich bis ca. 500W. Integrierter MOSFET Verstärker mit analogen und digitalen Schnittstellen.

Weitere technischen Merkmale:
Die Positioniersteuerung ist mit der Steuersoftware EMP ausgestattet. Eine Bedienoberfläche für alle manuellen Funktionen wird mitgeliefert. Die Steuerung kann aber über die digitalen Signale auch ohne SPS/PC betrieben werden.
Das System ist modular aufgebaut und kann mit identischen Baugruppen für weitere Antriebsachsen ausgebaut werden. Es ist hierfür lediglich eine 2-Draht Verbindung zwischen den Baugruppen herzustellen.
Konfiguration:
Die Digitaltechnik liefert eine einfache Inbetriebnahme ohne das Laden von Parametersätzen.
Die verschiedenen Möglichkeiten von anschliessbaren Sensoren lassen sich bei der Inbetriebnahme einstellen. Dies erfolgt alles menügeführt und per mouse-click. Die Daten werden dabei in einem nichtflüchtigen EEPROM abgespeichert, können aber auch jederzeit wieder geändert werden. Ebenso werden die Encoder und analogen Soll- oder Istwerte mit den Werte-Bereichen 0-10V, +/-10V, 4-20mA zugeordnet.
Als Encoder können Typen mit Differenzsignal oder mit unipolaren Signal verwendet werden. Die Auflösung der SSI-Encoder ist 25-bit (auf Anfrage andere Auflösungen konfigurierbar).
Im Auslieferungszustand sind die vom Kunden angegebenen Schnittstellen bereits berücksichtigt, so dass nach den Anschlussarbeiten der Betrieb sofort beginnen kann. Eine Inbetriebnahmeanweisung zur Überprüfung der Anschlüsse wird mitgeliefert.
Für die digitalen Signale können auch zusätzliche kundenspezifische Funktionen eingebaut werden (Optionen), die neben den LIMIT und Aktivierungsbefehlen auch ganz kundenabhängig programmiert werden können.
Bei jedem Einschalten, werden die Informationen aus dem Speicher eingelesen und die Anlagenkonfiguration hergestellt.
Überwachungs- und Schutzfunktionen:
Es können verschiedene Überwachungsfunktionen Verwendung finden, wenn dies gewünscht wird.
Das System wird abgeschaltet wenn die eingestellten Parameter überschritten werden.
Die Überwachungen lassen sich dabei beliebig zu- oder abschalten, je nach Erfordernissen im Betriebsablauf.
Die Steuerung ist mit einer selbstrückstellbaren Sicherung ausgestattet.
EMP Kommandotabelle:
Das Easy Motion Protocol (EMP) definiert Nachrichten zur Ansteuerung von Motoren und zur Verarbeitung von analogen sowie digitalen I/O. Jede Nachricht besteht aus einem Nachrichtenkopf mit einer Länge von 2 Bytes und einem Nachrichtenkörper mit der Länge von sechs Bytes. Bei serieller Übertragung wird jedes dieser acht Bytes durch zwei (ASCII) Zeichen (hexadezimal) dargestellt. Da jede Übertragung mit einem EOF (0x2A) abgeschlossen wird ergibt sich eine Gesamtlänge von 17 Zeichen. Gültige Zeichen sind Ziffern von 0-9 und Grossbuchstaben von A-F. Das erste Byte gibt die Art der Nachricht an. Gerade Zahlen sind Kommandos, ungerade Zahlen sind die Antworten vom System.
Das System kann auch mit jedem Terminal-Programm betrieben werden.
Betriebsarten:
auch als Quadratische U/f Steuerung bezeichnet für variable Drehmomentlasten.
auch als Lineare U/f Steuerung bezeichnet für konstante Drehmomentanwendungen.
| Eigenschaften | Einheit | Leistungsdaten |
| Anschlussspannung | VDC | 14 V - 40 V |
| Dauerstrom | A | 15 A |
| Spitzenstrom | A | 45 A |
| Antriebsleistung | W | 500 W |
| PWM Frequenz | kHz | 20 kHz |
| Digitaler Pegler | µs | PI < 100 µs |
| Abtastrate | ms | einstellbar, typ. 1 ms |
| Eingänge | JA | 8 digitale insgesamt 2 digitale für Endlagen 2 digitale für Takt/Richtung 2 analoge Eingänge auf Kundenwunsch (Option) |
| Freigabe / STOP / LIMIT | JA | vorhanden |
| Istwert Messung | JA | Inkrementalencoder (2/4 Draht) Absolutencoder bis 32 Bit Analog (0-10V, +/-10V, 4-20mA) |
| Sollwert Vorgaben | JA | PC/Laptop über USB/RS232 analog (0-10V, +/-10V, 4-20mA) Taktimpuls und Richtungssignal |
| Display | JA | Graphisches LCD (94mm x 60mm) 240 x 128 Pixel (Option) andere auf Anfrage |
| Tastatur | JA | Folientastatur (Option) |
| Feldbusanschluss | JA | RS232 Standard enthalten PROFIBUS (Option) CAN (Option) TCP/IP (Option) RS485 (Option) |
| Anlagenschutz | JA | selbstrückstellende Sicherung Verpolungsschutz Lastüberwachung Blockierüberwachung Kollisionsüberwachung stabiles Gehäuse |
| sonstige Eigenschaften | JA | Position, Inkrement genau Beschleunigungs Rampen einstellbar diverse Betriebsarten Status LED's |
| Speicher | JA | 256 k Flash EEPROM für Anlagenkonfiguration |
| Bedienoberfläche | JA | Easy Motion Protocoll (EMP) Gerätekonfiguration lesen und speichern |
| Gehäuse / Abmessungen | mm | Gehäuse Alu-Strangguss (BxHxT) 105x40x105 |
| Gewicht | Kg | 0.48 |
| Montage | JA | auf Normschiene oder mit Befestigungslaschen |
| RoHS | JA | konform |
| Umgebungstemperatur | °C | 0 °C - 85 °C (nicht kondensierend) |
Das System ist über verschiedenen serielle Schnittstellen auch erweiterbar, und damit einer individuellen Prozessumgebung anzupassen.
| DRS-500-HS Dokumentation im pdf-Format |  |
MSR Engineering, Gut Weilen 8, 28759 Bremen - Telefon (0421) 624372 Telefax (0421) 624374 E-mail: info@msr-engineering.de |
 |